This app repository is at https://gitlab.nrao.edu/nms-evla/nrao-ods/vla_data_sender . Its README contains the history of changes.
Summary
- Background application that checks for new observations frequently. Cycle time of the application: 01 minute (can be adjusted as needed).
- Initial app language: Python.
- It “guesses” the next target by checking the latest schedule created by the OST. The targets’ data (eg., coordinates, frequencies) are retrieved by a query to the VLA Observations DB.
- It confirms the guest by checking `*.evla` scripts generated by the OST. It assumes that the most recent one refers to the current or the next observation, based on its time contents.
- The app handles multi-band (sub-arrays) and simultaneous observations (eg., VLA+VLBA).
Justification
The information needed to feed the Operational Data Sharing DB (ODS DB) are originally stored in the (postgres) DB at sssproddb.aoc.nrao.edu (“chewbacca” machine). When the Operator creates a schedule and accepts a SB, the OST reads that DB and create the `*.evla` and `*.vci` scripts (to the Executor and correlator, respectively).
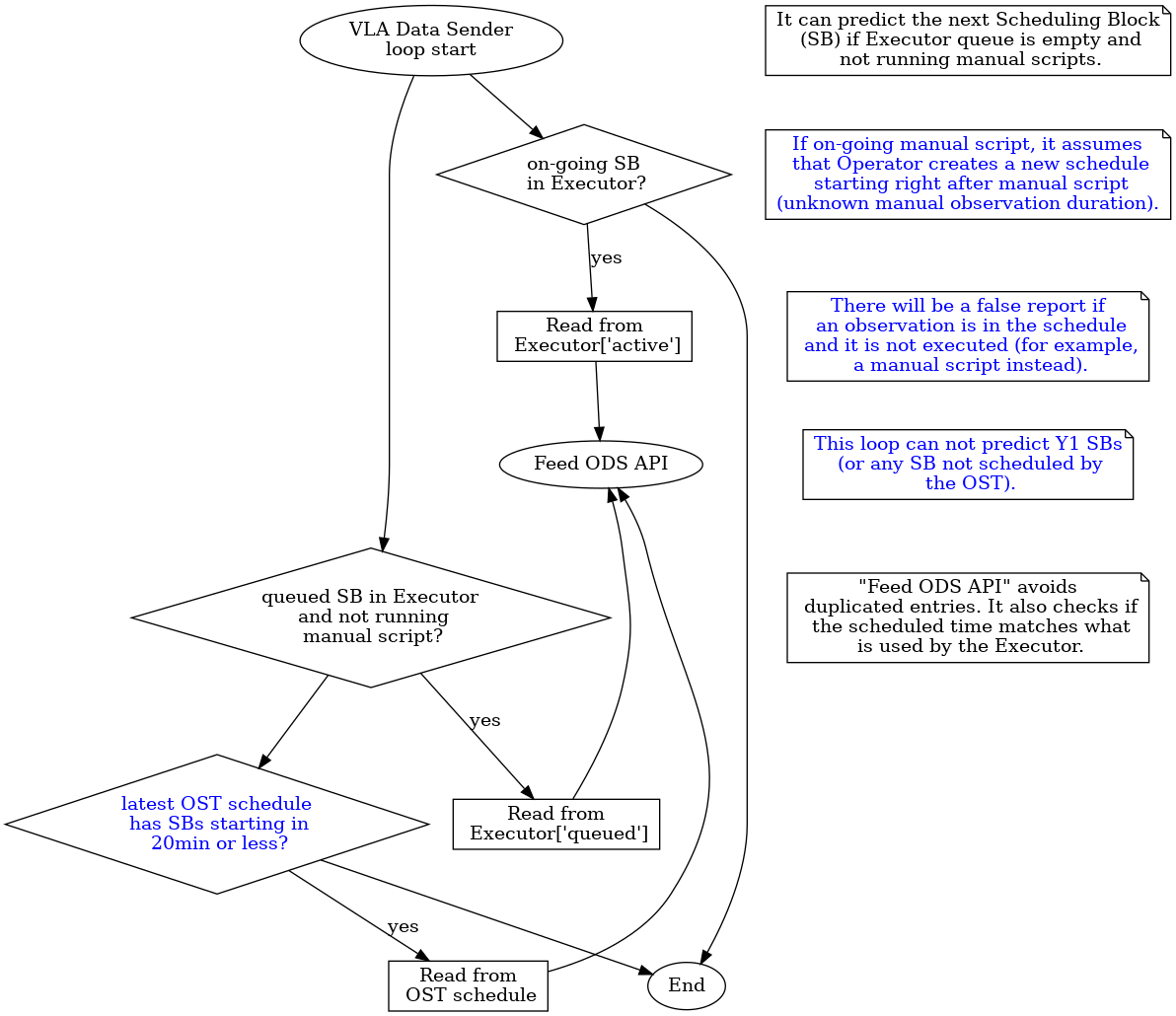
It would be easier to implement an application that only reads these script files and sends them to the ODS DB. However, the Operators can accept the next SB just a few seconds before it starts. Thus, in order to meet the 20 minutes in advance requirement, the feeder application needs to constantly monitor for new schedules created by the OST and confirm that the next starting target from the schedule was effectively accepted by the Operator.
The VLA Data Sender could be integrated in the OST. However, it is complex to make changes to OST, and it is a good feature to be able to be used if manual scripts are executed (outside the Dynamic Scheduling mode).
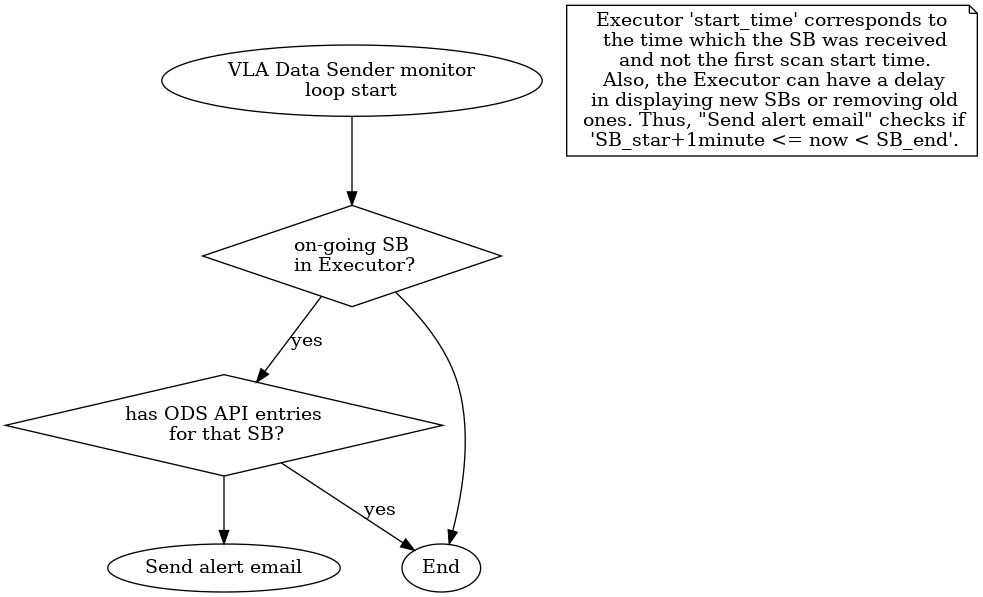
App flow description
VLA Data Sender:
VLA Data Sender Monitor:
JSON keys
The JSON keys are detailed in the ODS API documentation. More information at ODS Database API Operation Description.
Current Limitations/ToDo
Version 0.6 of the Data Sender is the "Hello World" version. Versions 0.7+ are for the post "Hello World" phase (Fall 2023 - Spring 2024).
- Version 0.6 only reports
is_pulsar_mode_bool. No integration times. - The data sender doesn't handle "on source" scans properly (short timestamp lengths).
Version 0.7 released on Nov 1st, 2023:
- It now reports the "integration time" (dump length) for regular observations (not for Pulsar ones).
- SB scans can be defined in terms of "on source" time (versus the default "duration").
- After fixing "on source" scans, all known discrepancies in the different timestamps are smaller than 5 sec (between this data sender, schedule = OST and execution = Executor) .
- It now reports the "slew_sec" in the JSON as the slew time in seconds (i.e., starting at the "src_start" timestamp, after the slew time the array should be in the "on-source" position).
Version 0.8, release date TBD:
- It reports the "integration time" (dump length) for all observations, including all Pulsar modes.
Future versions:
- Ensure that no sources are using 1950 epoch (instead of 2000)
- Support "holography" scans
- A logic/mechanism to observation updates is TBD (eg., new start+end times from the same obs_id), to avoid duplicates or outdated information.
- A web-based GUI (see "GUI description" below).
Notes
- Monitor the OST-to-Executor commands or the Executor broadcast messages to guarantee that the next target guess was made correctly. An answer: this shouldn't be needed, as the *.evla scripts should contain all the info needed.
- Integrate this feeder inside the OST. An answer: it is a good feature to be independent of the Dynamic Scheduling.
- Coordinates J2000 or current? Proper motion explicity or not? An answer: J2000, with retrospective proper motions taken into account when needed.
- Angles are defined in degrees (including Right Ascension). Although radians is the default unit for angles in the international system, ISO 6709 sets degrees for point location by coordinates. Also, major astronomical tools (Simbad, AstroPy) use degree instead of radians.
GUI description
- A way to stop the data sender when the VLA is not in Dynamic Scheduling mode (i.e., when OST is not in use). An answer: Operator GUI.
- It Informs the app status: "green" while the end-time of the last DB update if longer than 20 min from current time. "red" status otherwise.
- It informs the last DB update time.
- It has a button to stop the updates ("gray" status).
- It has a form to send manual ODS-DB updates (TBC).
Acronyms
- DB: database
- ODS: Operational Data Sharing
- OST: Observation Scheduling Tool
- SB: Scheduling Block
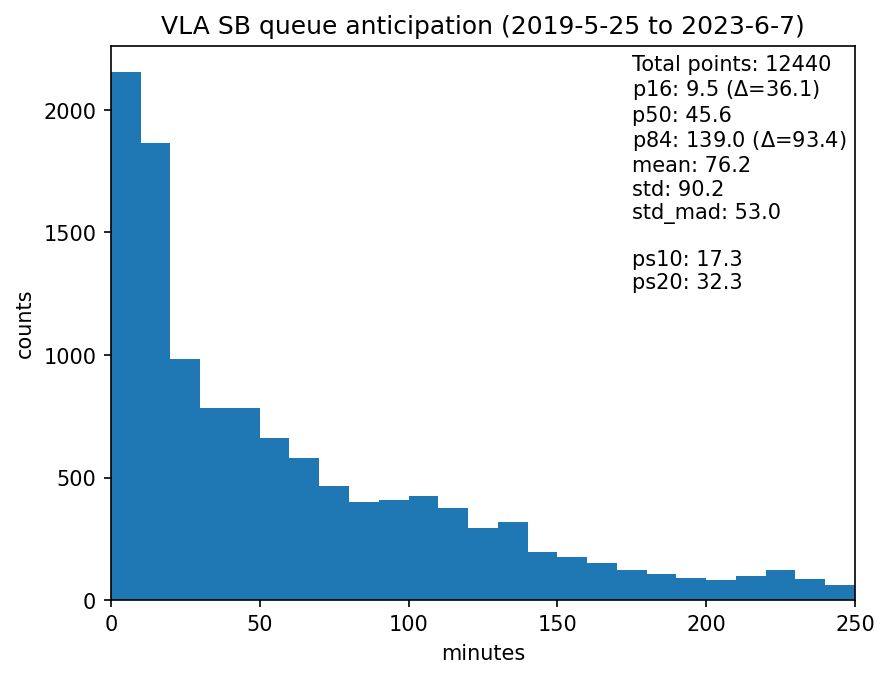
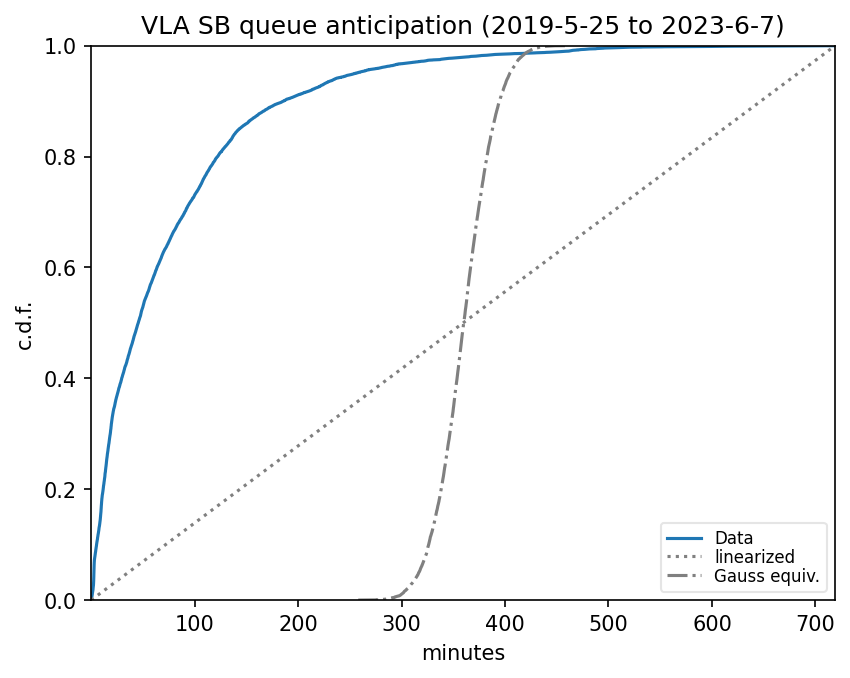
SB queue anticipation
In the last four years (mid 2023 -- mid 2019):
- 67.7% of the SBs were set more than 20 minutes in advance;
- 32.3% of the SBs were defined in up to 20 minutes;
- 17.3% of the SBs were defined in up to 10 minutes.
One could argue that the satellites configuration time could be accommodated in the gaps the dynamic scheduling creates (the major driver of the gaps is to accommodate priority observations.) I don't have the length distribution of gaps (yet), but I recently fount that they account for less than 3% of the dynamical time of the array. The typical SB length is 2 h = 120 min. 3% of that is 3.6 min. Thus, as long the satellite configuration time is longer than that, we would have impact on the array operations.
3 Comments
Adriana Escobar De La Torre
What feature of the Observational Status Sharing (OSS) Tool could be implemented in the OST? Only the data sender or anything else that may involve the API side? Would any of it require for SpaceX access any OST features?
Also, what would be the level of effort to implement OSS changes in the OST tool? It seems that the OSS will follow an incremental approach and in such a case, would there need to be a new OST deployment each time a new feature for OSS is added?
Since the initial idea is that the OSS will be populating its own database (OSDB) based on .evla,.vci files and at the same time OSDB will be used along with the GBT DB, I think it would be better to maintain the tool separated from others. Specially since SpaceX will be queryng the "joined" databases with an API and this may expose unnecessary sharing of extra features/data. However, if this is the easier approach it may be a good option.
On another note, is the GUI description section describing what the OST already does or are those ideas for the new tool?
Another thing that we may need to define is the format/units of the fields that we will be sharing through the API (like RA and DEC), but this would have to be agreed by the GBT as well.
Daniel M. Faes
This page describes the VLA data sender only, i.e., an application to read the VLA schedule and populate the OSDB. It is totally independent of the API.
What could we implemented directly in the OST is to feed the OSDB, since this is the place where the observation schedules are created. But I'm planning the tool using Python, to be independent of the OST. As was pointed out, this allows incremental development without frequent OST releases, at the same time that allow to feed the OSDB with manual observation scripts (outside the dynamic scheduling).
The GUI description is for this VLA data sender app.
I believe the format/units will be defined in the next project meetings and should be the same for VLA and GBT.
Adriana Escobar De La Torre
I understand now. Basically, the OST will send automatically the information to OSDB instead of pulling from an .evla file and at the same time a python tool can retrieve information from .evla files to cover for manual observations. Is this correct?
For the Hello Version of the tool, I believe the GUI may not need a button to stop the updates since mostly it will be dealing with GET requests. Although, If I remember correctly this was not fully decided on last meeting unless I am missing something, so this may be a TBC.
Thanks!